Klaus Jakob
User
Hallo zusammen,
ich merke immer wieder, dass beim Aufbau der Ruderkinematik so einige Basics falsch interpretiert werden. Auch tun wir uns öfter mal schwer, die optimale Rudermimik an den Flügel anzupassen.
Da helfen Progrämmchen, die schon zur Verfügung stehen, und sehr bequem zu bedienen sind. Sie stammen nicht von mir, sondern von Dieter Baurecht , Franz Durstberger und Wolfgang Korosec. Vielen Dank dafür!
Ich wollte die Progrämmchen nur noch mal aus der Vergessenheit holen. Sie basieren auf dem offenen Programm GeoGebra:
Servo-Ruder Anlenkung ( Dieter Baurecht ): https://www.geogebra.org/m/xjawuwxq
Servowegsimulator (Franz Durstberger): https://www.geogebra.org/m/FYNe93XS
Servoanlenkungssimulator (Wolfgang Korosec): https://www.geogebra.org/m/M2yrUm8s
Ein gewisses kleines Spiel wird im Servogetriebe immer vorhanden sein, das liegt in der Natur der Sache. Die Auswirkungen des Spiels werden nun betrachtet.
Hypothese:
-Halbieren der Servoarmlänge reduziert das Spiel.
Gegenargument:
Das Spiel stammt aus der Winkelbewegung des Servogetriebes und hat folglich bei einem kurzen Servohebel eine kleine lineare Bewegung des Gestänges zur Folge. Das ist erstmal gut so.
Aber:
-kleine Servohebel verlangen auch nach kleinen Ruderhörnern. Und hier ist die Situation genau umgekehrt als beim Servohebel:
-die geringe lineare Bewegung wird am kleinen Ruderhorn wieder vergrößert.
Fazit:
Durch Verkleinern der Servoarmlänge kann das Spiel nicht verringert werden. Allerdings steigen die Kräfte in dem Gestänge, dies wiederum benötigt stabile Gelenke, Gestänge, Scharniere und Lager. Der Verschleiß steigt auch, das Spiel kann größer werden.
Regel: halbe Servoarmlänge bedeutet doppelte Gestängekraft und Lagerkraft in allen 4 Gelenken.
Optimieren:
Das Servo sollte einen möglichst großen Drehwinkel durchfahren, weil das Spiel unabhängig vom Drehwinkel gleich groß bleibt.
Der Servohebel sollte so groß wie möglich sein, aber dennoch die gewünschten Randbedingungen erfüllen. (Möglichst wenig im Luftstrom stehen, Platz für Gabelkopf, etc.). Der Ausschlag des Ruders wird da weitere Grenzen setzen.
Klar, die Differenzierung der Hebel (Nulllage außerhalb von 90°) sollte vorab mechanisch festgelegt sein, um elektronische Verstellungen gering zu halten.
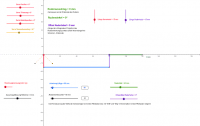
Hier ein Beispiel, erstellt mit dem Programm von Dieter Baurecht:
Beispiel: Servo mit 40 Ncm Drehmoment. (Achtung: Hebel in mm)
Servohebel und Ruderhebel bilden ein 4-Gelenk-Getriebe.
Im ersten Beispiel haben die Hebel die gleiche Länge. Der Ausschlag am Ruder ist zu groß. Gestängekraft 40 N.

Hier wird der Ausschlag reduziert durch Halbieren der Servoarmlänge. Die Gestängekraft und das Ruderdrehmoment verdoppeln sich:

Um die Gestängekraft zu reduzieren, werden die Länge von Servohebel und Ruderhorn verdoppelt.
Die Gestängekraft halbiert sich dadurch, was günstig ist.

Mit zunehmendem Ausschlag des Servoarms steigt die Gestängekraft, im Beispiel werden die 40 Ncm immer zunehmen. Klar, weil der wirksame Hebelarm geringer wird. Das habe ich hier aber nicht mehr vorgestellt, da sollte jeder mit dem Programm selber spielen.
Lagerkräfte:
Drehmoment= Kraft mal senkrechtem Hebelarm. Die Kraft am Hebel darf vektoriell in den Drehpunkt gelegt werden, wenn ein Drehmoment symbolisch hinzugefügt wird.

Fazit: in allen 4 Lagern unseres Viergelenkgetriebes (Abtrieb Servogetriebe, Gelenk des Servoarms, Gelenk des Ruderhorns, Ruderscharnier) wirken gleichgroße Kräfte. Die Verschraubung des Servos, z.B. im Flügel, erfährt die gleiche Kraft wie das Gestänge.
Die Programme sind auch sehr hilfreich, wenn es darum geht, Durchbrüche im Flügel auszulegen, die Lage des Servos zu definieren, Servoabtrieb nach vorne oder nach hinten, Form des Ruderhorns.
Grüße
Klaus.
ich merke immer wieder, dass beim Aufbau der Ruderkinematik so einige Basics falsch interpretiert werden. Auch tun wir uns öfter mal schwer, die optimale Rudermimik an den Flügel anzupassen.
Da helfen Progrämmchen, die schon zur Verfügung stehen, und sehr bequem zu bedienen sind. Sie stammen nicht von mir, sondern von Dieter Baurecht , Franz Durstberger und Wolfgang Korosec. Vielen Dank dafür!
Ich wollte die Progrämmchen nur noch mal aus der Vergessenheit holen. Sie basieren auf dem offenen Programm GeoGebra:
Servo-Ruder Anlenkung ( Dieter Baurecht ): https://www.geogebra.org/m/xjawuwxq
Servowegsimulator (Franz Durstberger): https://www.geogebra.org/m/FYNe93XS
Servoanlenkungssimulator (Wolfgang Korosec): https://www.geogebra.org/m/M2yrUm8s
Zum Spiel:
Ein gewisses kleines Spiel wird im Servogetriebe immer vorhanden sein, das liegt in der Natur der Sache. Die Auswirkungen des Spiels werden nun betrachtet.
Hypothese:
-Halbieren der Servoarmlänge reduziert das Spiel.
Gegenargument:
Das Spiel stammt aus der Winkelbewegung des Servogetriebes und hat folglich bei einem kurzen Servohebel eine kleine lineare Bewegung des Gestänges zur Folge. Das ist erstmal gut so.
Aber:
-kleine Servohebel verlangen auch nach kleinen Ruderhörnern. Und hier ist die Situation genau umgekehrt als beim Servohebel:
-die geringe lineare Bewegung wird am kleinen Ruderhorn wieder vergrößert.
Fazit:
Durch Verkleinern der Servoarmlänge kann das Spiel nicht verringert werden. Allerdings steigen die Kräfte in dem Gestänge, dies wiederum benötigt stabile Gelenke, Gestänge, Scharniere und Lager. Der Verschleiß steigt auch, das Spiel kann größer werden.
Regel: halbe Servoarmlänge bedeutet doppelte Gestängekraft und Lagerkraft in allen 4 Gelenken.
Optimieren:
Das Servo sollte einen möglichst großen Drehwinkel durchfahren, weil das Spiel unabhängig vom Drehwinkel gleich groß bleibt.
Der Servohebel sollte so groß wie möglich sein, aber dennoch die gewünschten Randbedingungen erfüllen. (Möglichst wenig im Luftstrom stehen, Platz für Gabelkopf, etc.). Der Ausschlag des Ruders wird da weitere Grenzen setzen.
Klar, die Differenzierung der Hebel (Nulllage außerhalb von 90°) sollte vorab mechanisch festgelegt sein, um elektronische Verstellungen gering zu halten.
Hier ein Beispiel, erstellt mit dem Programm von Dieter Baurecht:
Beispiel: Servo mit 40 Ncm Drehmoment. (Achtung: Hebel in mm)
Servohebel und Ruderhebel bilden ein 4-Gelenk-Getriebe.
Im ersten Beispiel haben die Hebel die gleiche Länge. Der Ausschlag am Ruder ist zu groß. Gestängekraft 40 N.
Hier wird der Ausschlag reduziert durch Halbieren der Servoarmlänge. Die Gestängekraft und das Ruderdrehmoment verdoppeln sich:
Um die Gestängekraft zu reduzieren, werden die Länge von Servohebel und Ruderhorn verdoppelt.
Die Gestängekraft halbiert sich dadurch, was günstig ist.
Mit zunehmendem Ausschlag des Servoarms steigt die Gestängekraft, im Beispiel werden die 40 Ncm immer zunehmen. Klar, weil der wirksame Hebelarm geringer wird. Das habe ich hier aber nicht mehr vorgestellt, da sollte jeder mit dem Programm selber spielen.
Lagerkräfte:
Drehmoment= Kraft mal senkrechtem Hebelarm. Die Kraft am Hebel darf vektoriell in den Drehpunkt gelegt werden, wenn ein Drehmoment symbolisch hinzugefügt wird.
Fazit: in allen 4 Lagern unseres Viergelenkgetriebes (Abtrieb Servogetriebe, Gelenk des Servoarms, Gelenk des Ruderhorns, Ruderscharnier) wirken gleichgroße Kräfte. Die Verschraubung des Servos, z.B. im Flügel, erfährt die gleiche Kraft wie das Gestänge.
Die Programme sind auch sehr hilfreich, wenn es darum geht, Durchbrüche im Flügel auszulegen, die Lage des Servos zu definieren, Servoabtrieb nach vorne oder nach hinten, Form des Ruderhorns.
Grüße
Klaus.
Zuletzt bearbeitet: